May 2026
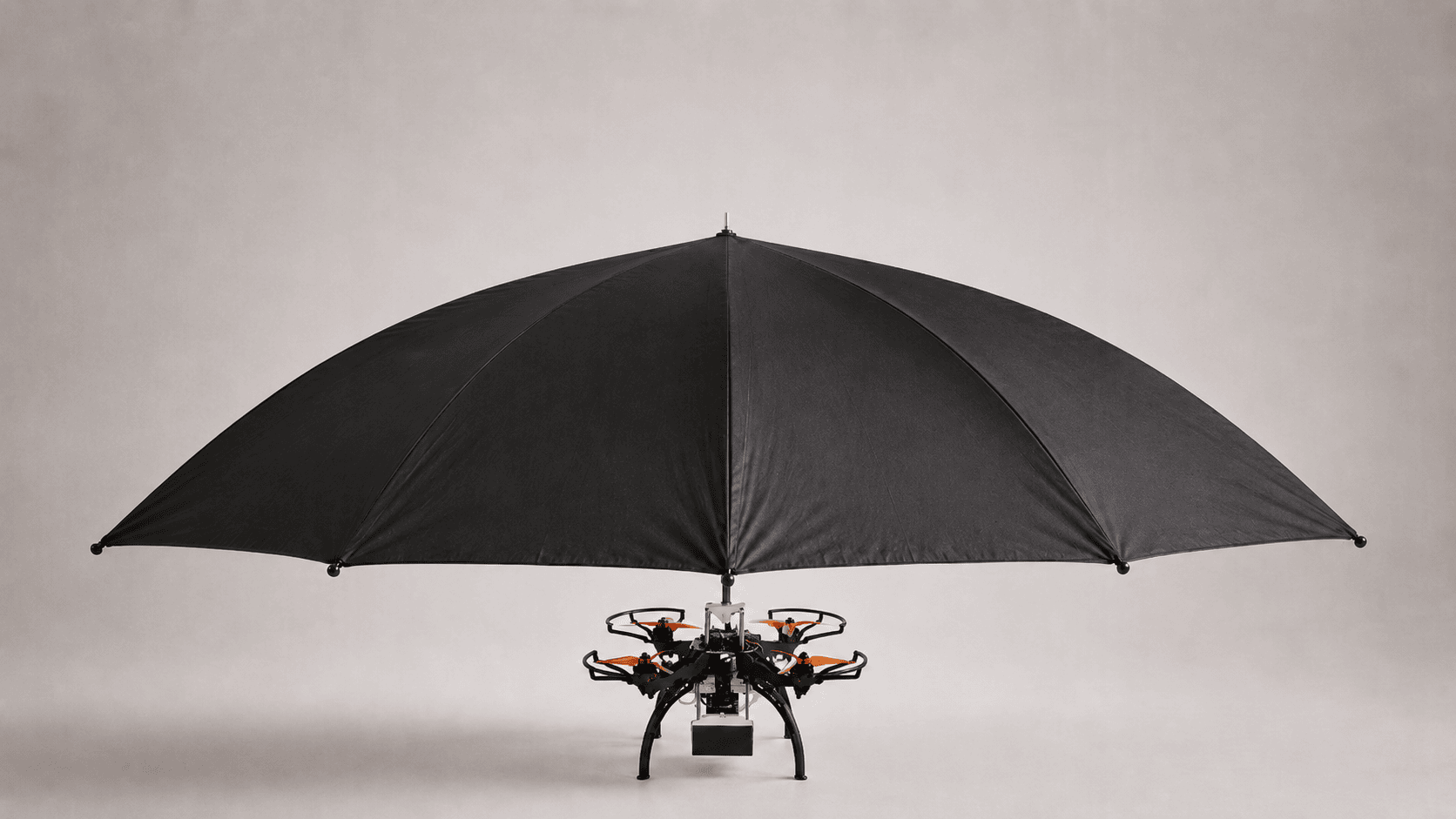
Floating Umbrella

A personal robotic umbrella that moves with you and stays overhead while walking.
It Started in the Rain
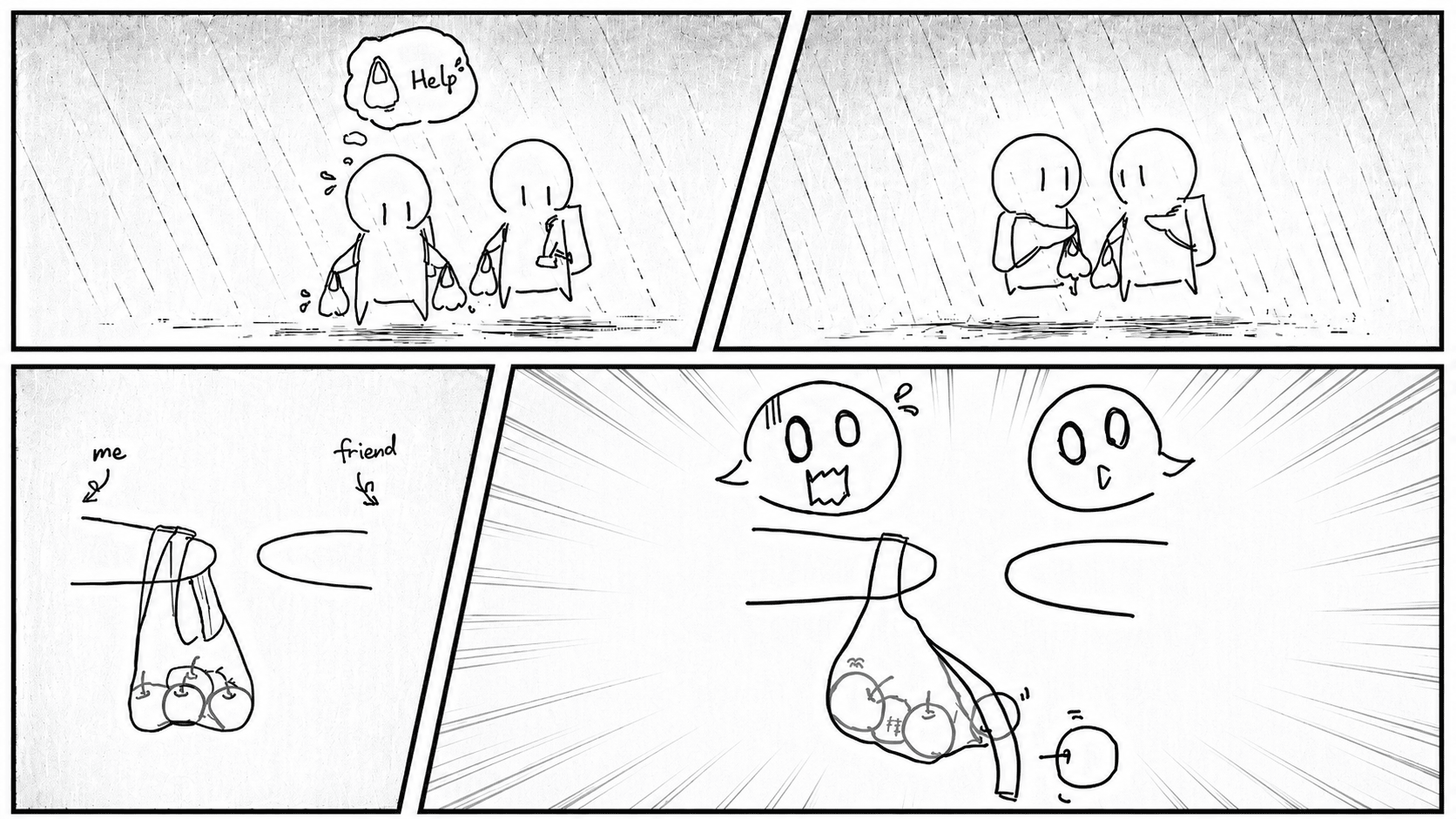
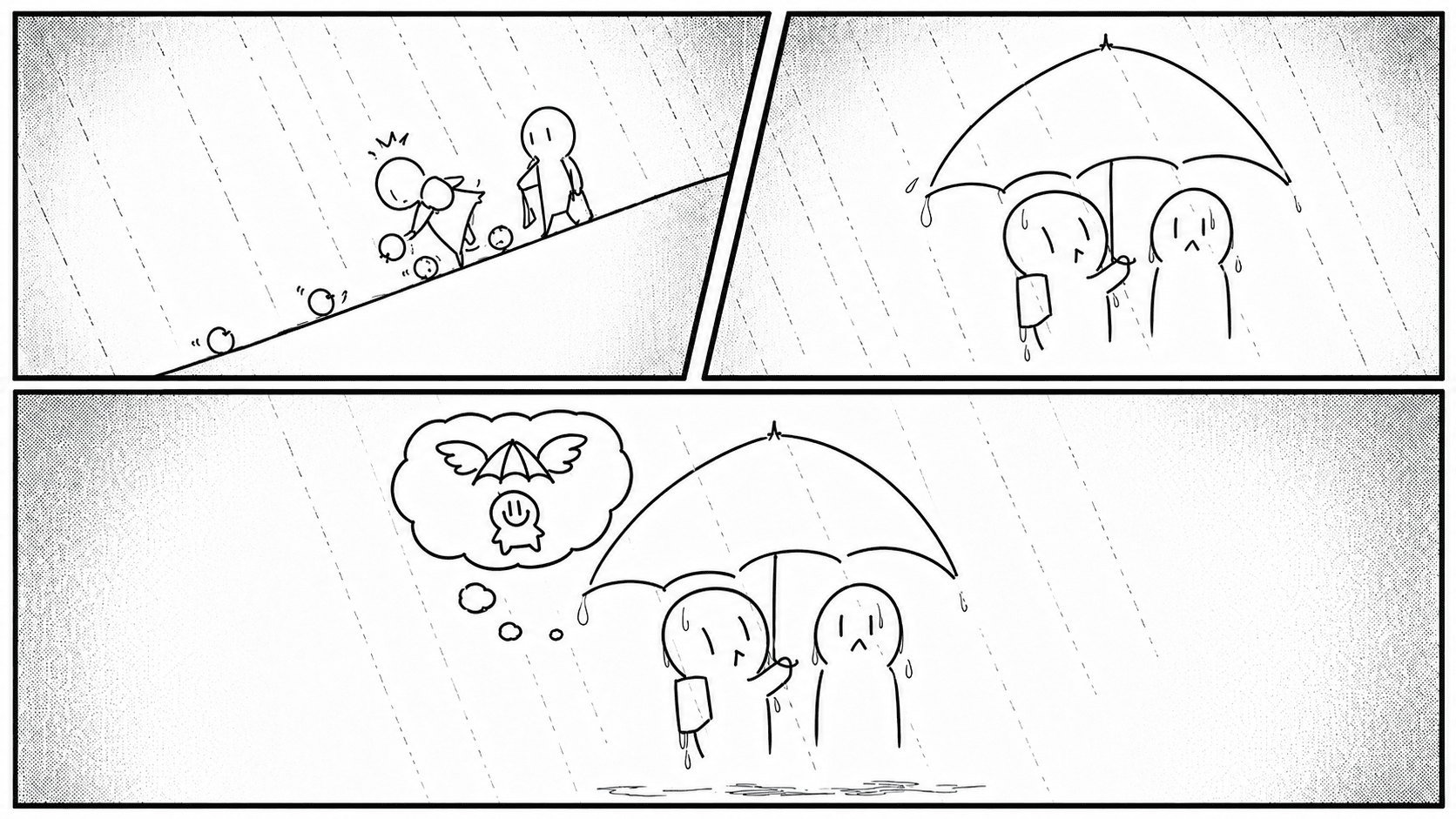
This project started after a walk back from the grocery store. My friend and I both had our hands full when it started raining, and my umbrella was buried in my backpack. Opening it meant setting something down first. When I asked my friend to take one bag, the fruit inside rolled across the sidewalk. By the time we picked everything up, we were already soaked.
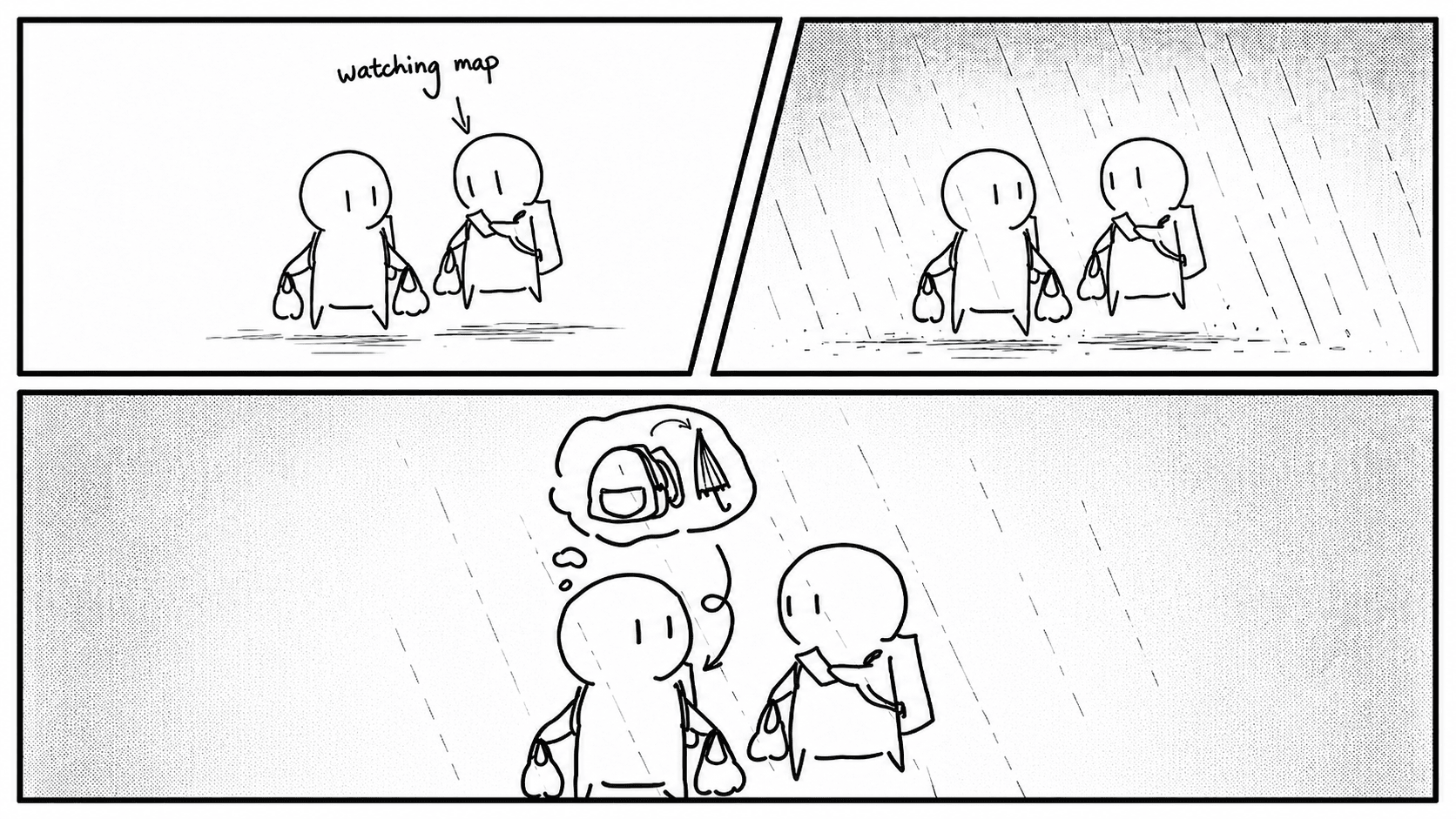
That small mess turned into a larger design question. Why does an umbrella still assume one hand is always available?
From Object to Companion
The umbrella is one of the oldest tools still in everyday use. Its form has barely changed. You still hold it, position it, carry it.
I wanted to try a different arrangement. Instead of the user managing the object, what if the object managed its own position? Floating Umbrella is somewhere between a weather tool and a small personal robot.
From Sketch to Airframe
Two build questions shaped the prototype. How can an umbrella hover, and how can it follow?
The build combines a quadcopter platform, a removable canopy mount, a flight controller for hover stabilization, and a small onboard camera board for tracking. The mount was designed to be swappable, so different umbrella sizes can be tested without rebuilding the whole frame.
The system is split into two parts. One keeps the vehicle stable in the air; the other watches for the user and sends movement corrections to the flight controller.

Vision and Flight
The tracking system looks for color and shape at the same time, not either one alone. Both have to match before it accepts a target. The gap between the target and the frame center is then converted into movement commands, keeping the umbrella with the user while smoothing out small oscillations.
The drone flies slightly behind and above the user, not directly overhead. If tracking fails, the vehicle drifts back rather than falling toward the person. When the target disappears, the system drops the lock rather than chasing a signal that is no longer there.

Outcome
The result is a personal robotic umbrella. It sits somewhere between a weather tool, a drone, and a small personal robot. It makes the interaction concrete enough to hold and test as a physical thing.